ROBTICS
Define , Explain , Describe, What ?
Robotics is the branch of technology that deals with the design, construction, operation, and application of robots, as well as computer systems for their control, sensory feedback (unit), and information processing.
ROBOTS
Need of , Necessity for, reason for, importance of ,usage of, What ?
The word Robot originated from CZECH word robota means work.
Mechanically a robot is composed of an arm and wrist subassembly plus a tool.
The need of the delivery of the end products of uniform quality in vast quantity makes the industry move towards the usage of computer based automation. For this the special purpose machines designed to perform predetermined functions in a manufacturing called ROBOTS. This is useful in doing repetitive jobs continually without tired.
In other way robots are the machines of automotive device to perform functions ordinarily ascribed to human beings. (wash machine) A robot is a reprogrammable multi functional manipulator designed to move material, parts , tools or specialized devices, through variable programmed motion for the performance of a variety of tasks.
General purpose manipulator with external sensors that can perform various assembly tasks.
Mechanically a robot is composed of an arm and wrist subassembly plus a tool.
An industrial robot is general-purpose , computer-controlled manipulator consisting of several rigid links connected in series by revolute or prismatic joints.One end of the chain is attached to a supporting base, while the other end is fre motion of the joints results in relative motion of the links.
The work volume is such that to reach a workipiece loacated within its work volume.
the work volume is the sphere of inluence of robot whose arm can deliver the wrist subassembly unit to any point within the sphere.Arm assembly can move with three degree of freedom.
The combination of the movements positions the wrist unit at the workpiece.
The combination of the movements positions the wrist unit at the workpiece
Robot Arm Kinematics
Is a analytical study of the geometry of the motion of a robot arm with reference to a fixed reference coordinate system as a function of time without considering the force and moment that causing the motion .
Analytical description of a spatial displacement of the robot as a function of time particularly relation between joint variable space and the end-effectors of robot arm position and orientation.
Both fundamental theoretical and practical interest we get
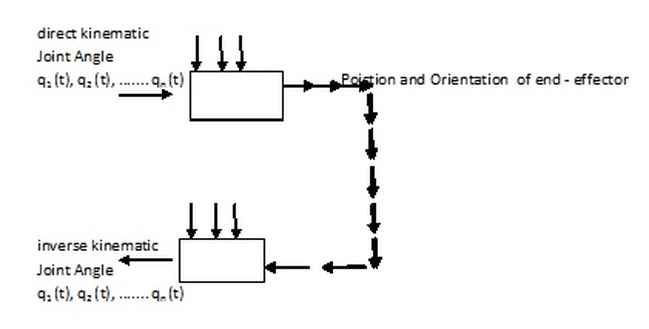
1. For a manipulator given joint angle vector q(t) = ( q1 (t), q2 (t), ....... qn (t) )T and geometric link parameter.
Where n is the number of degrees of freedom(what is the position and orientation of the end-effectors of the manipulator with reference to reference coordinate system)
If given a desired position and orientation to end –effectors of the manipulator and the geometric link parameters with reference to a coordinate system
2. Can the manipulator reach the desired prescribed hand position and orientation ?
and it can how many different manipulator configuration will satisfy the same
condition ?
First question is direct kinematic problem or forward kinematic problem
Second question is inverse kinematic problem or arm solution( kinematic )problem
Independent variables in robot ram are joint variables tasks stated in terms of coordinate frame reference and the inverse kinematic problems used mostly.
Simple diagram
Define , Explain , Describe, What ?
Robotics is the branch of technology that deals with the design, construction, operation, and application of robots, as well as computer systems for their control, sensory feedback (unit), and information processing.
ROBOTS
Need of , Necessity for, reason for, importance of ,usage of, What ?
The word Robot originated from CZECH word robota means work.
Mechanically a robot is composed of an arm and wrist subassembly plus a tool.
The need of the delivery of the end products of uniform quality in vast quantity makes the industry move towards the usage of computer based automation. For this the special purpose machines designed to perform predetermined functions in a manufacturing called ROBOTS. This is useful in doing repetitive jobs continually without tired.
In other way robots are the machines of automotive device to perform functions ordinarily ascribed to human beings. (wash machine) A robot is a reprogrammable multi functional manipulator designed to move material, parts , tools or specialized devices, through variable programmed motion for the performance of a variety of tasks.
General purpose manipulator with external sensors that can perform various assembly tasks.
Mechanically a robot is composed of an arm and wrist subassembly plus a tool.
An industrial robot is general-purpose , computer-controlled manipulator consisting of several rigid links connected in series by revolute or prismatic joints.One end of the chain is attached to a supporting base, while the other end is fre motion of the joints results in relative motion of the links.
The work volume is such that to reach a workipiece loacated within its work volume.
the work volume is the sphere of inluence of robot whose arm can deliver the wrist subassembly unit to any point within the sphere.Arm assembly can move with three degree of freedom.
The combination of the movements positions the wrist unit at the workpiece.
The combination of the movements positions the wrist unit at the workpiece
Robot Arm Kinematics
Is a analytical study of the geometry of the motion of a robot arm with reference to a fixed reference coordinate system as a function of time without considering the force and moment that causing the motion .
Analytical description of a spatial displacement of the robot as a function of time particularly relation between joint variable space and the end-effectors of robot arm position and orientation.
Both fundamental theoretical and practical interest we get
1. For a manipulator given joint angle vector q(t) = ( q1 (t), q2 (t), ....... qn (t) )T and geometric link parameter.
Where n is the number of degrees of freedom(what is the position and orientation of the end-effectors of the manipulator with reference to reference coordinate system)
If given a desired position and orientation to end –effectors of the manipulator and the geometric link parameters with reference to a coordinate system
2. Can the manipulator reach the desired prescribed hand position and orientation ?
and it can how many different manipulator configuration will satisfy the same
condition ?
First question is direct kinematic problem or forward kinematic problem
Second question is inverse kinematic problem or arm solution( kinematic )problem
Independent variables in robot ram are joint variables tasks stated in terms of coordinate frame reference and the inverse kinematic problems used mostly.
Simple diagram
Link of arm may rotate and or translate w r t co ordinate frame the total spatial displacement of end-effectors is due to angular rotation and linear translation of links. Matrix algebra describe spatial geometry of the links of robot arms w r t fixed reference frame. This method uses 4 x 4 homogenous matrix transformation to describe relation between two adjacent links and reduces the direct kinematic problem relates the spatial displacement of hand co-ordinate frame to reference co-ordinate frame. This matrix also useful in driving dynamic equation of motion of a robot arm.
The inverse kinematic problem involves several solving techniques. Matrix algebra , iterative or geometric are one among them. Homogeneous matrices of 4 x 4 explored in obtaining a joint solution for a simple manipulators. For a rotary joint manipulator geometric based link co ordinate systems and manipulator configuration will be presented in obtaining Closed form join solution.
